【智慧农业】农业轮式机器人的概念与发展现状
 本文节选自:
本文节选自:
陈睿韵, 田文斌, 鲍海波, 李端, 谢鑫浩, 郑永军, 谭彧. 农业轮式机器人三维环境感知技术研究进展[J]. 智慧农业(中英文), 2023, 5(4): 16-32.
Citation:CHEN Ruiyun, TIAN Wenbin, BAO Haibo, LI Duan, XIE Xinhao, ZHENG Yongjun, TAN Yu. Three-dimensional environment perception technology for agricultural wheeled robots: A review[J]. Smart Agriculture, 2023, 5(4): 16-32.
农业机器人的发展与其具体应用场景高度相关,环境感知系统作为机器人实现自主作业的核心部分,实现其功能的关键共性技术发展依赖于以农业轮式机器人为代表的基础平台的发展和应用特点。因此,分析农业轮式机器人不同的分类和国内外研究及推广应用中的经验和问题,对发展三维环境感知技术具有重要意义。
01农业轮式机器人概念与分类
轮式机器人是移动机器人的一种,是机器人领域的重要分支。广义上来说,只要移动机构属于或包含轮式结构的都可以称之为轮式机器人。除了常见的扫地机器人、物流机器人和智能轮椅等,无人驾驶汽车、轮式无人驾驶农机等大型智能车辆也属于轮式机器人的范畴。
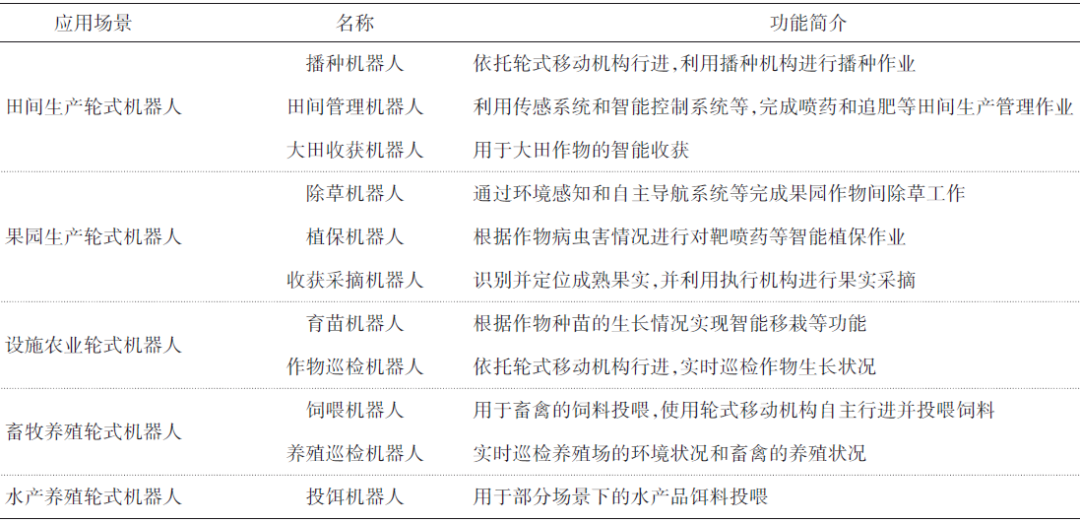
车轮数目决定了轮式机器人的设计原理与功能,因此根据车轮数目可以将轮式机器人分为单轮滚动机器人、两轮移动机器人、三轮及四轮移动机器人、多轮移动机器人及复合式(带有车轮)移动机器人。而按照农业轮式机器人进行农业生产时作业对象的不同,可以进一步将其分为表1所示的不同应用类型。
表1 主要农业轮式机器人分类及功能简介
Table 1 Agricultural wheeled robot taxonomy and functional overview
 02农业轮式机器人发展现状
02农业轮式机器人发展现状
不同类型的农业轮式机器人具有不同的使用特点,如表2所示。单轮滚动机器人分为单轮移动机器人和球形机器人两种,前者的典型代表是1996年美国卡耐基-梅隆大学所研制的Gyrover机器人。但由于单轮滚动机器人属于动态稳定而静态不稳定的系统,控制较为复杂,因此对其的研究和在农业领域的应用都较少。
两轮移动机器人根据车轮布置方式的不同可以分为两类,分别是两轮前后布置的自行车机器人和呈左右对称布置的两轮移动机器人。自行车机器人在具有一定的侧向不稳定性的同时属于欠驱动的非完整约束系统,对农业环境等复杂地形适应能力较弱。与之类似,呈左右对称布置的两轮机器人也需要考虑自平衡问题,该类型机器人在农业领域中也较为少见。
表2 轮式机器人在农业领域的使用特点
Table 2 Characteristics of wheeled robots in the Agricultural Sector
-yzsq.png) 三轮及四轮移动机器人是轮式机器人中最常见的类型和研究的重点,也是轮式机器人在农业领域的主要应用类型。农业四轮移动机器人主要以四轮无人车和无人驾驶拖拉机等为代表,其概念样机如图1所示。与其他几种轮式机器人相比较,四轮移动机器人最符合农业环境下的作业与使用要求。
三轮及四轮移动机器人是轮式机器人中最常见的类型和研究的重点,也是轮式机器人在农业领域的主要应用类型。农业四轮移动机器人主要以四轮无人车和无人驾驶拖拉机等为代表,其概念样机如图1所示。与其他几种轮式机器人相比较,四轮移动机器人最符合农业环境下的作业与使用要求。
-ichi.jpg)
图1 概念无人驾驶拖拉机
Fig. 1 Conceptual autonomous tractor
从整体上看,各个国家特有的农业发展特点与农业生产模式使得农业轮式机器人在不同国家的发展现状有所不同。例如,日本在农业机器人领域处于领先地位,是农业机器人研究较早、市场发育较为成熟的国家之一。但由于土地资源有限,日本的农业以高度的精细化管理为特点。因此日本的研究人员开发了各种类型的农业轮式机器人用于育苗、扦插、采摘和农药喷洒等农业生产活动。这些农业轮式机器人具备高度的自动化和精确性,有助于提高农作物的产量和质量。美国在农业轮式机器人领域也有广泛的研究和应用,但与日本相比,美国领土面积大,农业生产以大规模农场为主,农业高度机械化和工业化。在这一前提下,美国对农业轮式机器人的研究侧重于大田环境下的作物种植、管理和收割,在无人驾驶拖拉机、无人驾驶收获机等方面取得了较多研究成果,并且已经将部分农业轮式机器人产品用于实际的农业生产作业。
与外国相比,中国在农业轮式机器人领域的研究起步较晚,目前中国对于农业轮式机器人的研究处于快速发展阶段,已经开发了多种适合中国农业大规模和多样性特点的农业轮式机器人,如蔬果采摘机器人(图2)、嫁接机器人和田间管理机器人等。虽然近年来中国农业轮式机器人的相关研究取得了很大进展,但现有的农业轮式机器人更多地停留在研究阶段,在适用性、作业效果以及智能化程度等方面仍面临亟需解决的瓶颈问题。适用性方面,现有的农业轮式机器人多为针对某一特定作业场景下的某一生产环节而设计,不适用于同一作业场景下的其他环节和不同的作业场景。这在限制了使用效率的同时,增加了使用农业轮式机器人进行农业生产的成本。在生产规模有限的情况下,这将阻碍农业轮式机器人在实际农业生产中的大规模应用。作业效果方面,现有的农业轮式机器人在大田播种、大田收获等方面已经有了较为成熟的作业解决方案,可以替代人工进行作业。但在果蔬采摘、切种育种等领域仍存在识别精度低与作业速度慢的问题。智能化程度方面,随着机器视觉与人工智能技术的不断进步,农业轮式机器人的智能化程度较以前有了较大提升,但作业环境的复杂性与生产的经济性使得现有技术水平仍然无法满足农业生产对其智能化程度的要求,很多任务无法由农业轮式机器人单独完成。
-xwei.jpg)
图2 轮式番茄采摘机器人
Fig. 2 Wheeled tomato picking robot
为提升农业轮式机器人的适用性、作业效果和智能化程度,不仅需要改进农业轮式机器人的结构,还需要进一步提升其感知系统和决策控制系统的水平。环境感知技术作为感知系统的关键技术,在直接影响信息获取效果的同时,还间接影响了后续决策、控制和执行环节。因此,对农业环境感知技术的研究具有重要意义。



人物A 回复
这是回复
人物B 回复
我回复你了
人物A 回复
回复已收到